For computers connected to the Internet, no special setup is required. Multiple network connections are used internally between various AUVW components, particularly the execution and dynamics threads.
Future versions of the AUV Workbench are expected to have
The most significant AUVW networking is the usage of DIS packets to communicate vehicle motion from each dynamics thread to the 3D display window. Because this traffic is multicast, different AUV Workbenches on the same local-area network (LAN) can monitor and display entity-state PDU updates from each other.
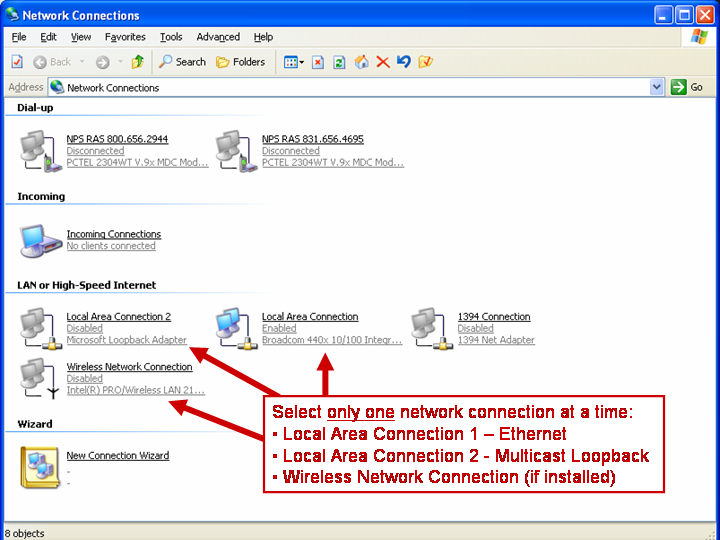
The primary networking limitation in the AUVW occurs under Windows. You must have one and only one networking interface active, otherwise multicast packets are lost. This problem is due to a buggy Windows implementation of multicast loopback.
When no network is available, you can set up multicast capabilities on localhost by installing a special Windows component.
Note that you must turn the loopback adapter back off (via Network settings) once your localhost is reconnected to an active network.
You likely want to go into Network Connections, find the new adapter (likely named something obscure like LAN Connection 4) and rename it as Multicast Loopback Adapter.
More information on DIS usage in X3D scenes is available at Extensible 3D (X3D) Graphics DIS Component.
Back to the Help page index, the AUV Workbench: Introduction page, or online to AUV Workbench home page.