-
Class Summary Class Description AirspeedController Extends UavController to implement airspeed control modes.AltitudeController Extends UavController to implement altitude control modes Primarily responsible for controlling engine powerControlCoefficients Class for loading and maintaining control coefficients utilized by UavController objects All control constants should be greater than or equal to zeroHeadingController Extends UavController to implement heading control modes Implements both heading control and side slip controlLoiterController Extends UavController to implement waypoint control modesOpenLoopController Extends UavController to implement open loop control modesUavController Abstract class for implementing specific UAV control modesUavControllers UavControlParameters Contains variables required for setting vehicle and sensor control modes These variables may change during the course of a run Also contains an overloaded parseCommand function (1 version for text commands, one for AVCL) that will set these variables.WaypointController Extends UavController to implement waypoint control modes -
Enum Summary Enum Description UavControlType Types of controllers used in auv vehicles.
Package execution.uav.control Description
Unmanned air vehicle (UAV) controller classes.
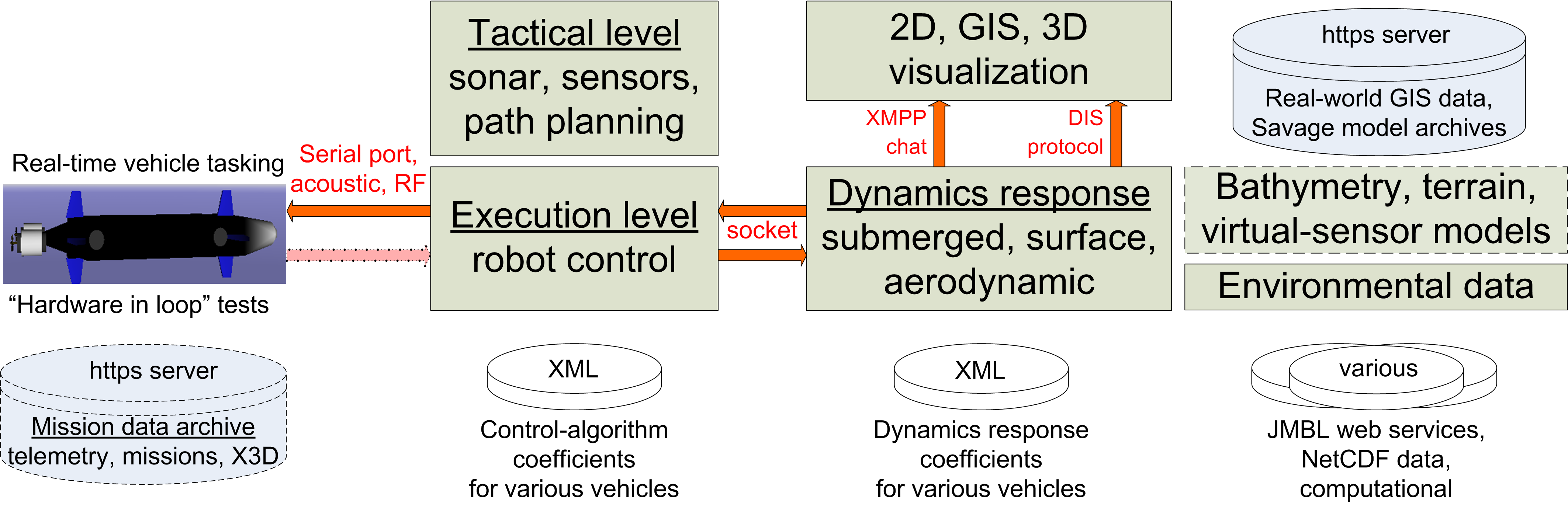
The execution classes emulate vehicle controllers to drive propulsors (such as propellers or jets) and effectors (such as plane surfaces or rudders) in response to motion commands. In turn these controllers react to the realistic physical response provided by the real-time 6 degree of freedom (DOF) dynamics engines. Controllers can be open loop (without feedback) or open loop (utilizing feedback) based on that vehicle response.
Further information is available on the AUV Workbench home page.