| diagram | 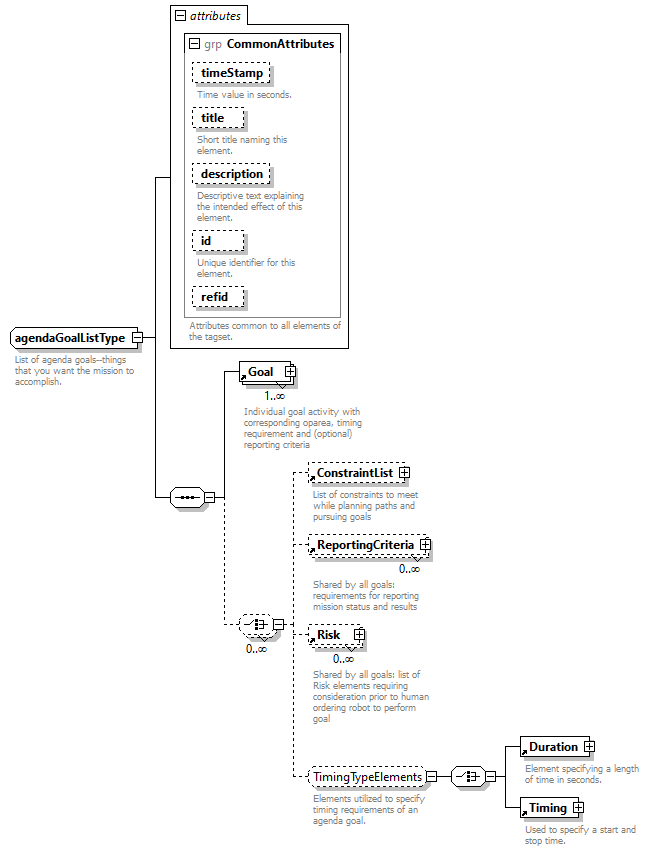 |
||||||||||||||||||||||||||||||||||||||||||||
| children | Goal ConstraintList ReportingCriteria Risk Duration Timing | ||||||||||||||||||||||||||||||||||||||||||||
| used by |
|
||||||||||||||||||||||||||||||||||||||||||||
| attributes |
|
||||||||||||||||||||||||||||||||||||||||||||
| annotation |
|
||||||||||||||||||||||||||||||||||||||||||||
| source | <xsd:complexType name="agendaGoalListType"> <xsd:annotation> <xsd:documentation>List of agenda goals--things that you want the mission to accomplish.</xsd:documentation> </xsd:annotation> <xsd:sequence> <xsd:element ref="Goal" maxOccurs="unbounded"/> <xsd:choice minOccurs="0" maxOccurs="unbounded"> <xsd:element ref="ConstraintList" minOccurs="0"/> <xsd:element ref="ReportingCriteria" minOccurs="0" maxOccurs="unbounded"> <xsd:annotation> <xsd:documentation>Shared by all goals: requirements for reporting mission status and results</xsd:documentation> </xsd:annotation> </xsd:element> <xsd:element ref="Risk" minOccurs="0" maxOccurs="unbounded"> <xsd:annotation> <xsd:documentation>Shared by all goals: list of Risk elements requiring consideration prior to human ordering robot to perform goal</xsd:documentation> </xsd:annotation> </xsd:element> <xsd:group ref="TimingTypeElements" minOccurs="0"/> </xsd:choice> </xsd:sequence> <xsd:attributeGroup ref="CommonAttributes"/> </xsd:complexType> |
XML Schema documentation generated by XMLSpy Schema Editor http://www.altova.com/xmlspy