-
Interface Summary Interface Description DriverInterface Classes that can control the vehicle should implement this interface. -
Class Summary Class Description ControlCoefficients DepthController File: DepthController.java Author(s): Duane Davis and David Gassier Date: 19 April 2004 Revised: 03 October 2006 Description: Controller for setting auv fore and aft plane and vertical thrusters in all control modes except open loopDockingController HomingController HoverController IterationTest LateralController LoiterController LQRDepthController LQRLoiterController LQRWaypointController OpenLoopController RecoveryController RotateController SlidingModeDepthController SlidingModeLoiterController SlidingModeWaypointController TargetController UuvController UuvControllers An object which holds a list of public controller fields, and maintains a "current" one.UuvControlParameters Contains variables required for setting vehicle and sensor control modes These variables may change during the course of a run Also contains an overloaded parseCommand function (1 version for text commands, one for AVCL) that will set these variables.UuvDriver WaypointController -
Enum Summary Enum Description UuvControlType Types of controllers used in UUV vehicles.
Package execution.uuv.control Description
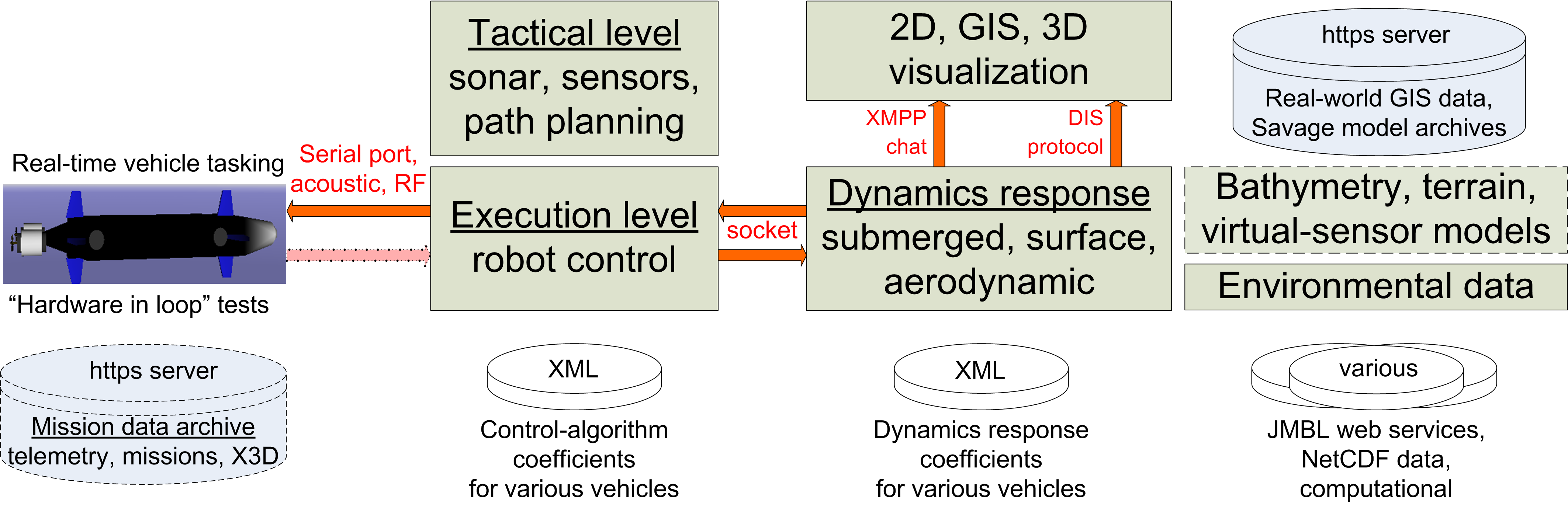
Unmanned underwater vehicle (UUV) controller classes.
The execution classes emulate vehicle controllers to drive propulsors (such as propellers or jets) and effectors (such as plane surfaces or rudders) in response to motion commands. In turn these controllers react to the realistic physical response provided by the real-time 6 degree of freedom (DOF) dynamics engines. Controllers can be open loop (without feedback) or open loop (utilizing feedback) based on that vehicle response.
Further information is available on the AUV Workbench home page.