-
Class Summary Class Description UGVBody Rigid body representation of a tracked unmanned ground vehicle (or a 4-wheeled vehicle that steers by differential wheel speed).UGVModel Coefficients and vehicle characteristics for a tracked unmanned ground vehicle (or a wheeled vehicle that uses differential wheel speed to steer).
Package dynamics.models.ugv Description
Unmanned ground vehicle (UGV) dynamics package.
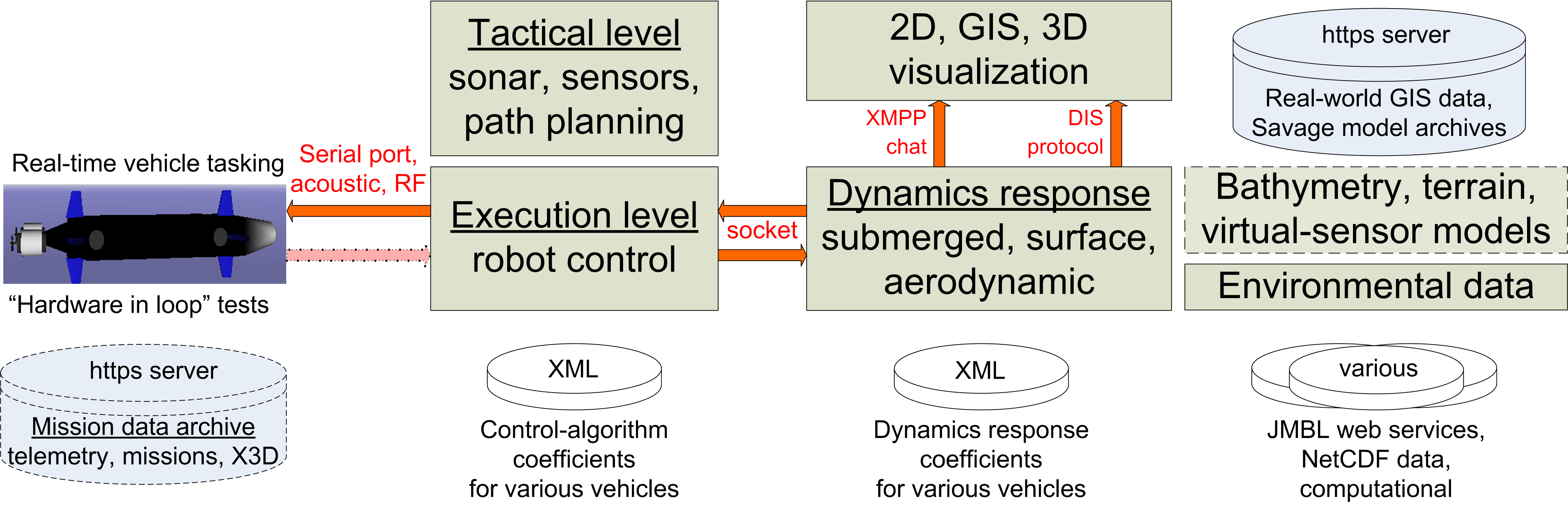
The dynamics classes model real-time 6 degree of freedom (DOF) physics for a variety of vehicles. This provides realistic physical response to motion commands by vehicle controllers.
Further information is available on the AUV Workbench home page.