-
Class Summary Class Description Bottom UUVBody Six degree-of-freedom underwater vehicle hydrodynamics based on Healey uuvModelUUVGlobals File: AUVglobals.java Author: Don Brutzman (web.nps.navy.mil/~brutzman) Revised: 6 March 1977 - converted to Java by Kevin Byrne and Jeff Schmidt 20 February 1998 - Updated by Kevin Byrne AUV telemetry state vector Note these are globals for direct access by any world model.UUVModel
Package dynamics.models.uuv Description
Unmanned underwater vehicle (UUV) dynamics package.
The dynamics classes model real-time 6 degree of freedom (DOF) physics for a variety of vehicles. This provides realistic physical response to motion commands by vehicle controllers.
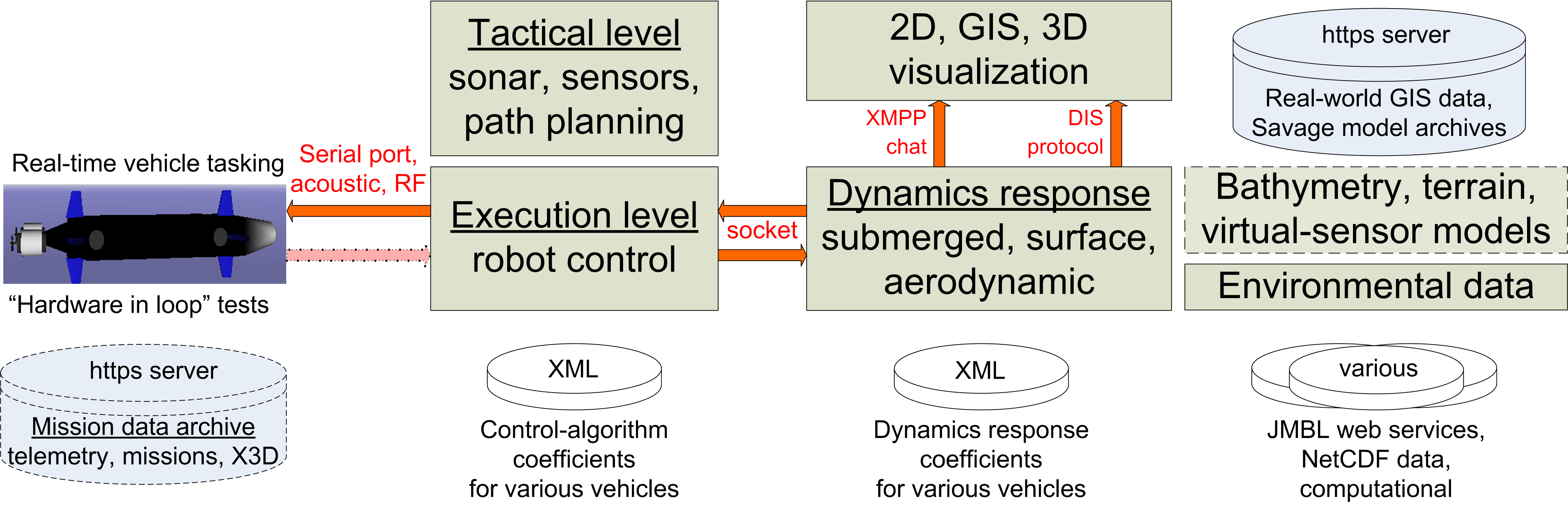
Further information is available on the AUV Workbench home page.