-
Class Summary Class Description AriaInterface Class to facilitate interface with the Pioneer3 control hardware utilizing the Aria APIControlHardware Class to facilitate interface with control (differential wheel) hardware.
Package execution.ugv.hardware Description
Unmanned ground vehicle (UGV) hardware emulation classes.
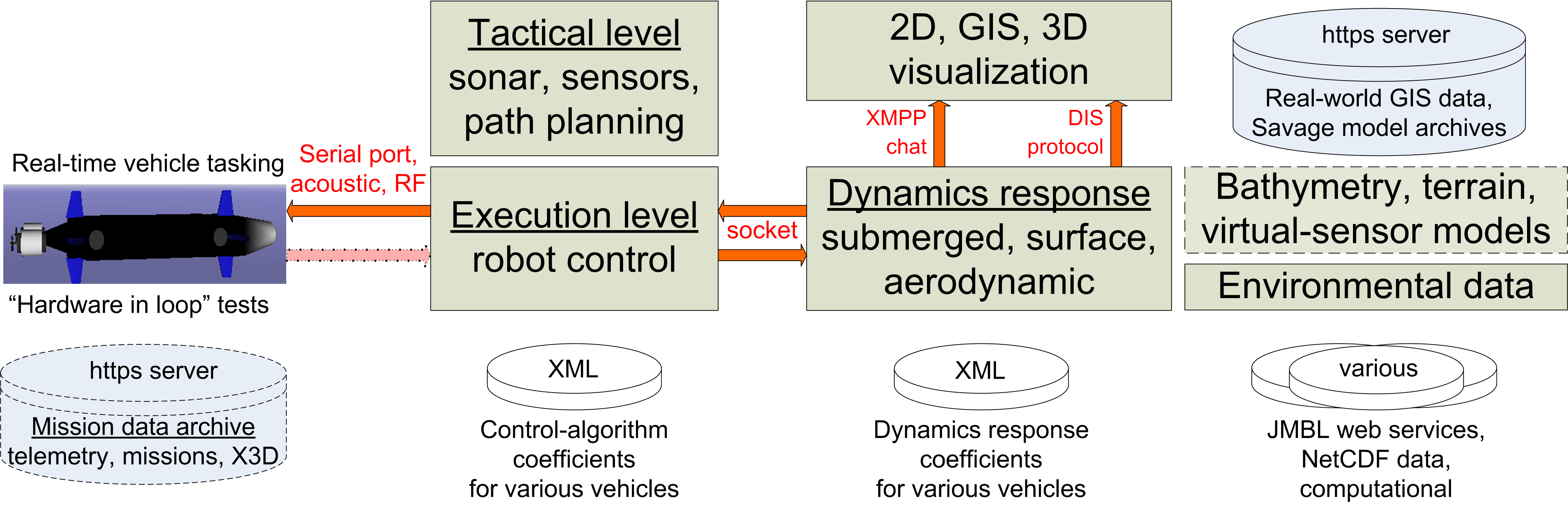
The execution classes emulate vehicle controllers to drive propulsors (such as propellers or jets) and effectors (such as plane surfaces or rudders) in response to motion commands. In turn these controllers react to the realistic physical response provided by the real-time 6 degree of freedom (DOF) dynamics engines. Controllers can be open loop (without feedback) or open loop (utilizing feedback) based on that vehicle response.
Further information is available on the AUV Workbench home page.