-
Class Summary Class Description UgvExecution Main class for UGV Execution Software for driving tracked UGV or one that uses differential wheel speed to steerUgvExecutionParameters Global execution runtimeFlags and initialization settings that are specific to the UGV.UgvState UgvStrategic Implements strategic level control for an AUVUgvTactical Implements tactical level control for a UGV
Package execution.ugv Description
Unmanned ground vehicle (UGV) execution classes, plus control and hardware packages.
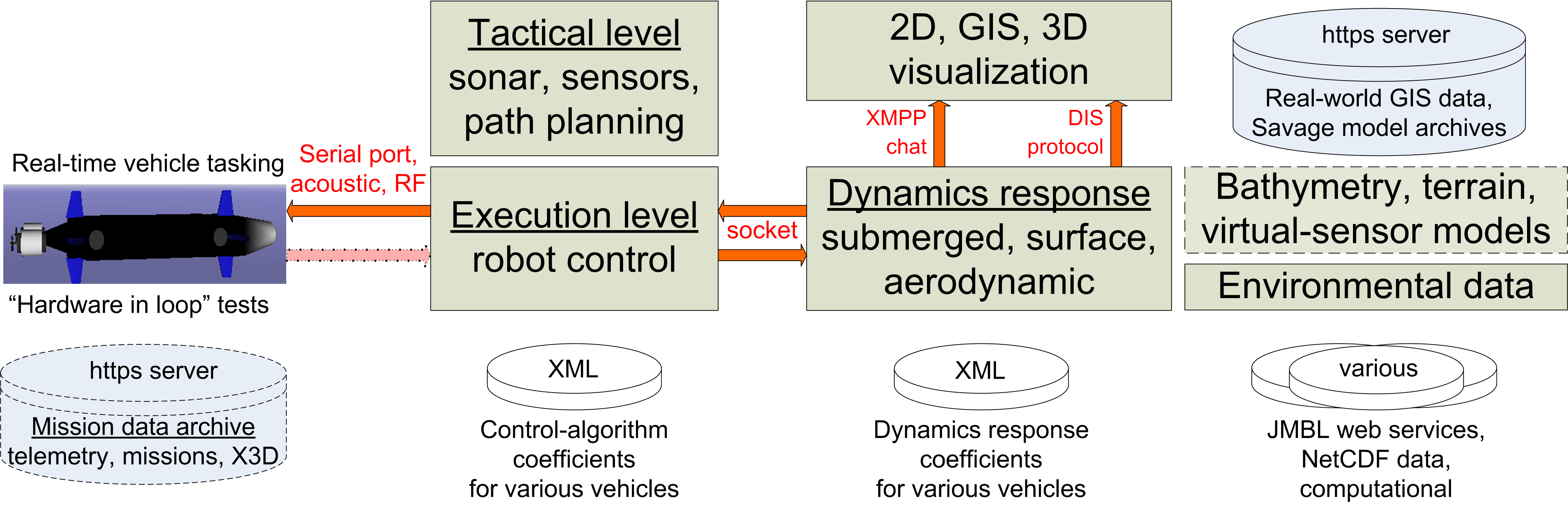
The execution classes emulate vehicle controllers to drive propulsors (such as propellers or jets) and effectors (such as plane surfaces or rudders) in response to motion commands. In turn these controllers react to the realistic physical response provided by the real-time 6 degree of freedom (DOF) dynamics engines. Controllers can be open loop (without feedback) or open loop (utilizing feedback) based on that vehicle response.
Further information is available on the AUV Workbench home page.