-
Class Summary Class Description DISNetworkedRigidBody Program: DISNetworkedRigidBody.java Description: DIS network interface for RigidBody model Author: Don Brutzman Java translation: Kevin Byrne, 19 March 98 Revised: Terry Norbraten, 16 FEB 2009 - Completed articulated parameter clobber fix - Implemented new OpenDIS library Duane Davis, 19 August 04 - repackaged and changed inheritance structure Duane Davis, 12 February 04 - enabled settable SITE, APPLICATION, and ENTITY IDs Duane Davis, 27 October 03 - fully implemented articulation parameters Don Brutzman, 14 November 99 - cast ArticulatedParameter values to double vice short Don Brutzman, 31 May 2001 - upgraded DIS library calls Notes: ARTICULATED PARAMETER VALUES ARE FINALLY TRANSMITTED CORRECTLY!Dynamics MOVES Institute Naval Postgraduate School, Monterey, CA www.nps.edu Created: Apr 4, 2007 2:16:24 PMDynamicsGlobals Contains global runtime parametersDynamicsImpl NullDynamics MOVES Institute Naval Postgraduate School, Monterey, CA www.nps.eduRigidBody RigidBodySocket World Implements ray picking within the virtual world based on an X3D model.
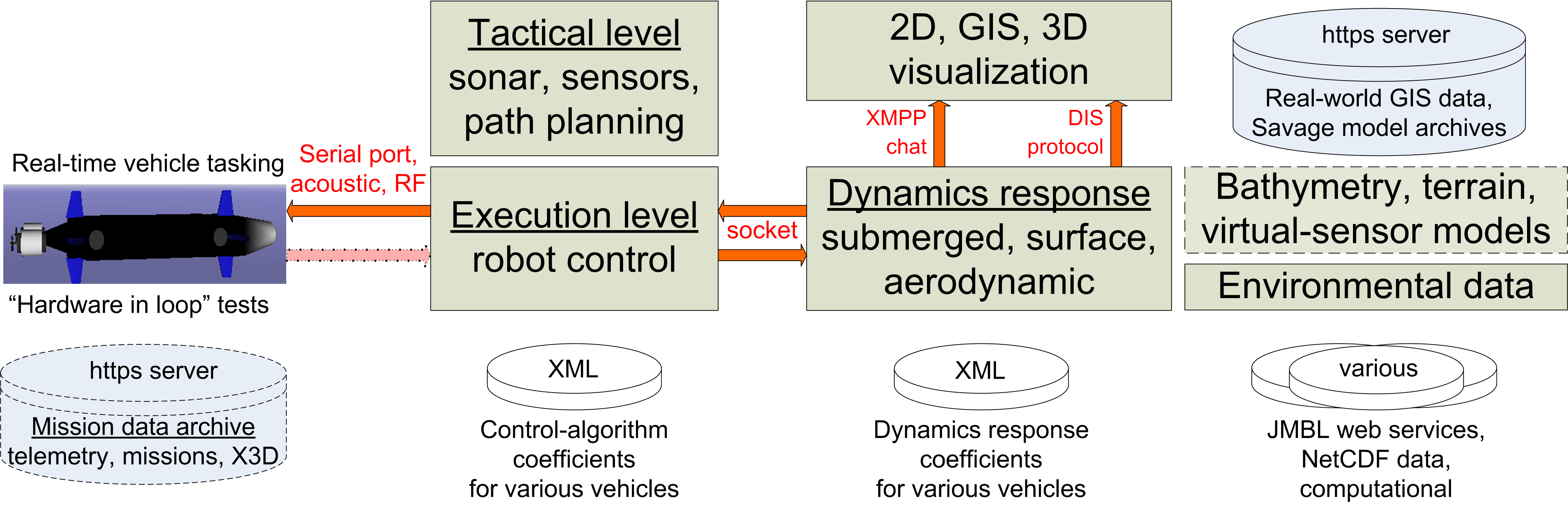
Package dynamics Description
The dynamics classes model real-time 6 degree of freedom (DOF) physics for a variety of vehicles. This provides realistic physical response to motion commands by vehicle controllers.
Further information is available on the AUV Workbench home page.