-
Interface Summary Interface Description ControllerType Marker interface to stamp an object (enum class for each vehicle type) as a controller type.Execution.IdleHandler An object which implements this interface will do something (or nothing) with the time it is given. -
Class Summary Class Description CommunicationsHandler Class used to interpret and handle messages transmitted between vehicles.ControllerGroup This is a class to hold the instantiated vehicle controllers for the execution of a given vehicle type.ControlParameters A parent class for each class of the same name in the uav, auv, usv packages.EnviroHandler Class to receive the updates, and handle the requests for current latitude, longitude, depth and time.Execution Abstract class for implementation of specific autonomous vehicle control programsExecutionThreadLocals Execution thread-local variable(s)RuntimeFlags Run-time execution flags and initialization settings.StateVector Container for vehicle state variables.StatusParser MOVES Institute Naval Postgraduate School, Monterey, CA www.nps.eduStrategic Abstract class for implementation of specific autonomous vehicle strategic level controlTactical Abstract class for implementation of specific autonomous vehicle tactical level controlUtilities Contains static utility methods for use throughout the packageVehicleController Super class of all controllers used in all vehicle types.VehicleExecutionParameters Abstract class to define common methods for processing parameters affecting vehicle execution. -
Enum Summary Enum Description RuntimeFlags.ExecutionControlMode How an execution may be controlled in Execution.
Package execution Description
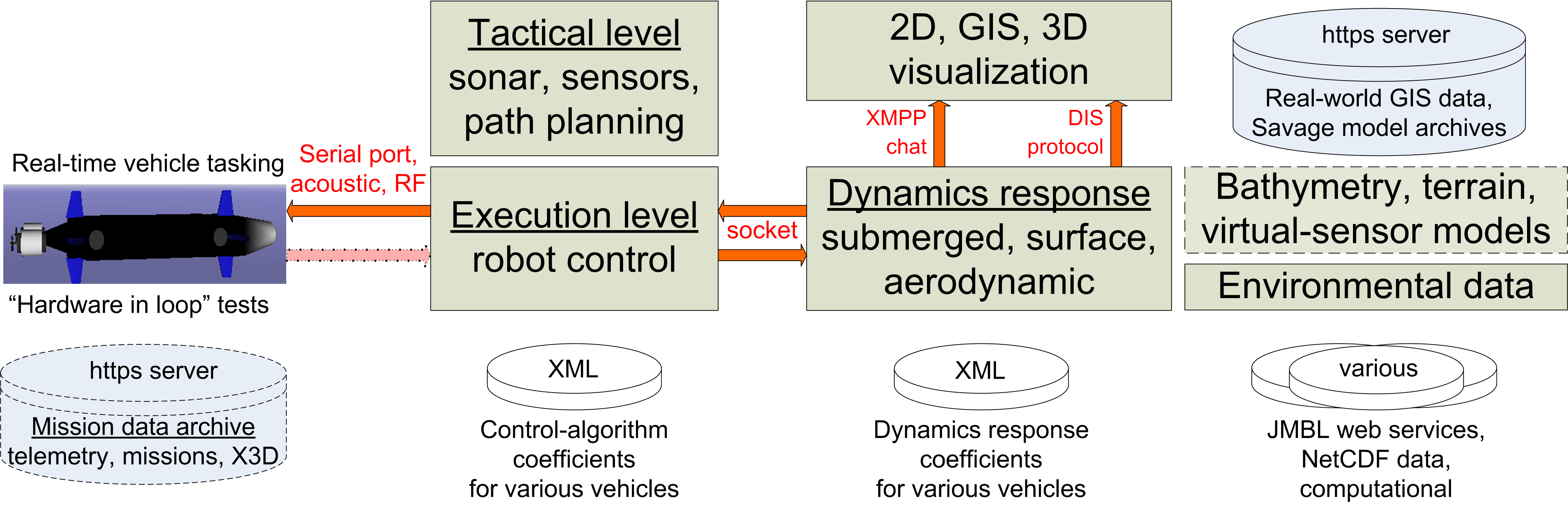
The execution classes emulate vehicle controllers to drive propulsors (such as propellers or jets) and effectors (such as plane surfaces or rudders) in response to motion commands. In turn these controllers react to the realistic physical response provided by the real-time 6 degree of freedom (DOF) dynamics engines. Controllers can be open loop (without feedback) or open loop (utilizing feedback) based on that vehicle response.
Further information is available on the AUV Workbench home page.